







ロボティクス研究室では,
柔軟構造物の制御を中心として, 機械システム・飛行ロボットの制御問題や技術開発,
確率システム理論を基礎とした信号処理,状態推定,最適制御などの研究を行っています.
第67回システム制御情報学会研究発表講演会(SCI’23)にて研究成果を発表しました
2023年5月17日〜19日に京都で開催された第67回システム制御情報学会研究発表講演会(SCI’23)にて
M1の荒井君が研究成果を発表しました。
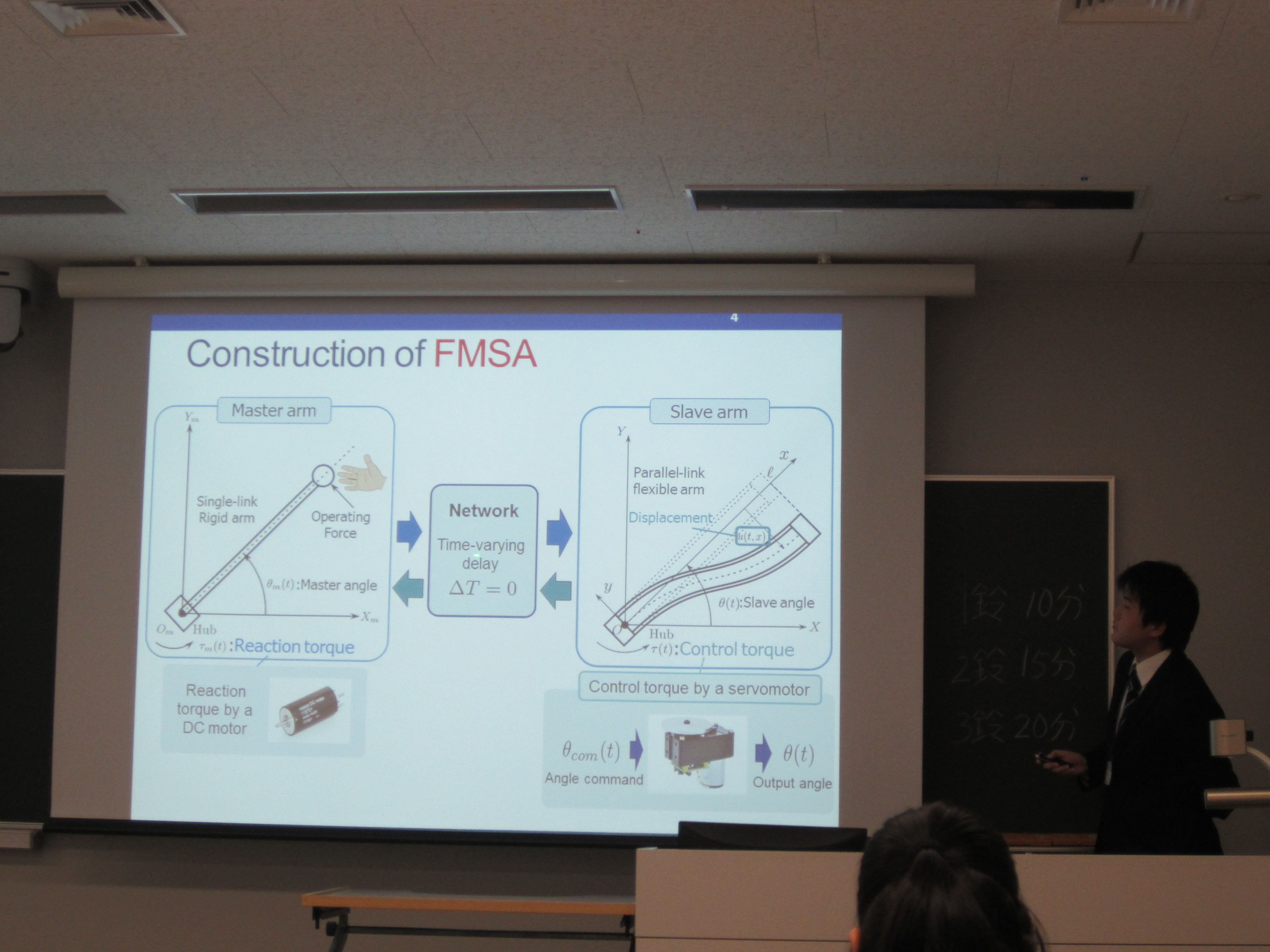
Title(荒井):FRITによる柔軟マスタースレーブアームのバイラテラルの制御器のチューニング
日本機械学会関西支部 卒業研究発表講演会にて研究成果を発表しました
2023年3月15日に本学で開催された日本機械学会 関西支部 2022年度関西学生会 卒業研究発表講演会にて
B4の大久保君,益井君が研究成果を発表しました。また,同講演会にて東助教が特別講演を行いました.
Title(大久保):吸着型インフラ点検用ドローンのためのToFカメラを用いた鋼材の傾斜角度の推定
Title(益井):マルチコプタのための締結離脱を目的とした安全帯機能を有するアームの開発
Title(東):鋼構造物につかまるドローンのための点検支援技術について
IEEE TENCON2022にて研究成果を発表しました
2022年11月1日〜4日に開催された2022 IEEE region 10 conference (TENCON2022)にて
M2の千田君,M1の土肥君が研究成果をオンラインで発表しました。
Title(千田):Verification of the Pivot Turn Performance of the Legged Air Vehicle
Title(土肥):Integrated Control and Docking Mechanism for Docking-Undocking Drones in the Air
研究紹介ポスターページを公開しました
オープンキャンパスに合わせて研究紹介ポスターのページを公開しました.
研究室公開の時間の都合でオープンキャンパスでは紹介できなかった研究についても紹介しています.
コチラからどうぞ.
部屋番号が変わりました
10号館の改修工事が完了し,教員居室の番号が下記の通りに変わりました.
澤田教授居室:10号館5階527号室,東助教居室:10号館5階528号室です.
研究が紹介されました
国立大学55工学系学部のホームページにてインフラ点検用ドローンの研究が紹介されました.
高校生向けに分かりやすく技術を紹介しているほか,鋼材にドローンが飛行,吸着,離脱する実験動画も紹介されています.
くわしくはコチラからどうぞ.
研究紹介ポスターページを公開しました
オープンキャンパスに合わせて研究紹介ポスターのページを公開しました.
研究室公開の時間の都合でオープンキャンパスでは紹介できなかった研究についても紹介しています.
コチラからどうぞ.
第16回全日本学生室内飛行ロボットコンテストで2連覇しました!
日程:2020年9月25日(金)〜27日(日)
場所:大田区総合体育館
研究室所属メンバーでチームを組み出場した第16回全日本学生室内飛行ロボットコンテストのマルチコプター部門で優勝しました.
マルチコプター部門は,機体,基板,制御プログラムなど全てを自作した,複数のプロペラを持つドローンで物資運搬,
8の字飛行,自律制御飛行などのタスクを規定時間内にこなすことで加点されていく競技です.
研究で培った開発技術,パイロットの操縦技術,メンバーのサポートの全てが上手く機能し,操縦しやすい機体に仕上げることで優勝につながり,2連覇を達成しました.
決勝の様子は下記動画サイトにて公開されています.
決勝(本研究室チームは1:14:54あたりから):https://www.youtube.com/watch?v=OBG8V0rnS28&t=4494s
{kind=link}
{kind=link}
IEEE/SICE SII2020にて研究成果を発表しました
2020年1月12日〜15日にハワイ州ホノルルで開催された2020 IEEE/SICE International Symposium on System Integrationにて
M2の太原君,中村君が研究成果を発表しました。
Title(太原):Design and Simulation of a State Estimator for a Quadcopter with Safety Harness
Title(中村):A Positioning System and Position Control System of a Quad-Rotor Applying Kalman Filter to a UWB Module and an IMU
第62回自動制御連合講演会にて優秀発表賞を受賞しました.
2019年11月8日~11月10日に開催された第62回自動制御連合講演会にて本研究室の西川雄君が歩行アシストロボットに関する発表を行い,2019年12月16日に優秀発表賞を受賞しました.
(受賞課題:位相平面上のトラジェクトリ正規化による装着型歩行アシストロボットの制御精度の改善)
IEEE TENCON2019にて研究成果を発表しました
10月17日〜20日にインド ケララ州コーチンで開催されたIEEE TENCON2019にてM2の瀬戸君 (Title:Attitude Control by Using the Movement of Center of Gravity for the Legged Air Vehicle)が研究成果を発表しました。
研究室説明会の開催について
日程:2019年10月23日(水)14:30〜
場所:10号館1階102室
令和元年11月から卒研生としてロボティクス研究室への配属を希望する学生向けに,上記の通り研究室説明会を行います.
配属希望者は可能な限り参加して下さい.
尚,卒研配属希望学生向けの説明会のため学外の方の参加はご遠慮ください.
第15回全日本学生室内飛行ロボットコンテストで優勝しました!
日程:2019年9月27日(金)〜29日(日)
場所:大田区総合体育館
研究室所属メンバーでチームを組み出場した第15回全日本学生室内飛行ロボットコンテストのマルチコプタ部門で優勝しました.
マルチコプタ部門は,機体,基板,制御プログラムなど全てを自作した,複数のプロペラを持つドローンで物資運搬,
8の字飛行,自律制御飛行などのタスクを規定時間内にこなすことで加点されていく競技です.
研究で培った開発技術,パイロットの操縦技術,メンバーのサポートの全てが上手く機能し,良い結果に繋がりました.
決勝の様子は下記動画サイトにて公開されています.
決勝(本研究室チームは1:59:50あたりから):https://www.youtube.com/watch?v=FSD9OLmd5tE
{kind=link}
{kind=link}
{kind=link}
{kind=link}
2019年度のオープンキャンパスのお知らせ
日程:2019年8月9日(金),10(土)
時間:11:30~12:30(午前の部),15:30~16:30(午後の部)
場所:10号館1階102室
令和元年8月に高校生を対象としたロボティクス研究室の紹介を上記の通り行います.
研究室所属の学生がパネルや実機を用いて説明を行います.
1日あたり3テーマについて紹介する予定です.
King Mongkut’s University of Technologyから留学生が来ました
2019年6月5日よりタイのキングモンクート大学からThitiwut Srichalongrat君が来ました. これから約2ヶ月間,ロボティクス研究室のメンバーとして活動します.
{kind=link}
{kind=link}
第61回自動制御連合講演会にて研究発表をしました
2018年11月17日,18日に南山大学 名古屋キャンパスで開催された第61回自動制御連合講演会にて,
M1の荒井君が装着型歩行支援ロボットについて研究成果を発表しました.
(Title:歩行リハビリテーションのための6軸姿勢角センサを利用した装着型歩行支援ロボットの開発)
{kind=link}
{kind=link}
ISCIE SSS2018にて研究発表をしました
11月1日〜2日に京都で開催されたISCIE SSS2018にて澤田教授(Title:Kalman Filter Based Control of A Rehabilitation Robot for Assisting Knee Torque of Individuals after Stroke), M2の出射君(Title:Bilateral Control System of Nonlinear Flexible Master-Slave Arms with Random Delay Affected by Contact Force with Obstacle)、 M2の高野君(Title:Gain Scheduling LEQG Control for 2D Model of Two-Wheeled Inverted Pendulum)、 M1の山本君(Title:Stochastic Control of Flexible Horizintal Positioning Systems)が発表しました。
{kind=link}
{kind=link}
{kind=link}
IEEE TENCON2018にて研究発表をしました
10月28日〜30日に韓国 済州島で開催されたIEEE TENCON2018にてM2の張君(Title:Design and Simulation of a Control System for a Quadcopter with a Safety Harness)、M1の中村君(Title:Development pf Vibration measurement Unit for Steel Structure Using MEMS Accelerometer)が発表しました。
{kind=link}
{kind=link}
研究室説明会の開催について
日程:2018年10月16日(火)16:10〜
場所:10号館1階102室
平成30年11月からロボティクス研究室への卒研配属を希望する学生向けに,上記の通り研究室説明会を行います.
配属希望者は可能な限り参加して下さい.
尚,卒研配属希望学生向けの説明会のため学外の方の参加はご遠慮ください.
オープンキャンパスで研究室を公開しました
日程:2018年8月10日(金),11日(土)
高校生を対象として,研究を進めているマニピュレータや飛行ロボットに関する展示を行い,
研究室メンバーがパネルや実機を用いて説明を行いました.
たくさんの方に来場いただき,ありがとうございました.
{kind=link}
{kind=link}
{kind=link}
2017年度関西学生会学生卒業研究発表講演会にて研究発表をしました
2018年3月10日に摂南大学 寝屋川キャンパスで開催された
2017年度関西学生会学生員卒業研究発表講演会にて,
B4の中村君が鋼構造物のためのセンシング技術について研究成果を発表しました.
第5回 制御部門マルチシンポジウムにて研究発表をしました
2018年3月6日〜9日に東京都市大学 世田谷キャンパスで開催された
第5回 制御部門マルチシンポジウムにて,
M2の仲野君が装着型歩行アシストロボットについて研究成果を発表しました.
IEEE TENCON2017にて研究発表をしました
2017年11月5日〜8日にマレーシア ペナン島で開催されたIEEE TENCON2017にて
M2の赤堀君,M1の張君,東助教がインフラメンテナンス用UAV,陸空複複合境移動体の飛行制御シミュレーション,
インフラメンテナンス用ロボットのテーマについて研究成果を発表しました.
研究室説明会の開催について
日程:2017年10月20日(金)14:30〜
場所:10号館1階102室
平成29年11月からロボティクス研究室への配属を希望する学生向けに,上記の通り研究室説明会を行います.
配属希望者は可能な限り参加して下さい.
オープンキャンパスで研究室を公開しました
日程:2017年8月10日(木),11日(金)
高校生を対象として,研究を進めているマニピュレータや飛行ロボットに関する展示を行い,
研究室所属学生がパネルや実機を用いて説明を行いました.
たくさんの方に来場いただき,ありがとうございました.
{kind=link}
{kind=link}
新M1歓迎会
新M1歓迎餃子祭りを開催しました!! ロボティクス研究室のエースに俺はなる!!とのことです。
{kind=link}
{kind=link}
忘年会
2016年お疲れ様でした!来年もよろしくお願いします!
{kind=link}
{kind=link}
研究室説明会の開催について
日程:2016年10月14日(金)16:10〜
場所:10号館1階102室
平成28年11月からロボティクス研究室への配属を希望する学生向けに研究室説明会を行います.
配属希望者は参加して下さい.
オープンキャンパスを開催しました
日程:2016年8月7日(日),8日(月)
高校生を対象として,研究を進めているマニピュレータや飛行ロボットに関する展示を行いました.
たくさんの方に来場いただき,ありがとうございました.
第58回 自動制御連合講演会
日程:2015年11月14日(土)〜15日(日)
場所:神戸大学 六甲台第2キャンパス
The 10th International Symposium on Advanced Science and Technology in Experimental Mechanics
日程:2015年11月1日(日)〜4日(水)
場所:くにびきメッセ(松江市)
第59回 システム制御情報学会研究発表講演会
日程:2015年5月20日(水)〜22日(金)
場所:中央電気倶・y部
第2回 制御部門マルチシンポジウム
日程:2015年3月4日(水)〜7日(土)
場所:東京電機大学
{kind=link}
{kind=link}
{kind=link}
copyright (c) Robotics Laboratory. All right reserved.